
Hello,大家好,欢迎来到创导咨询。
AGV的应用越来越广泛,那么AGV是如何实现自主移动的呢?今天我们就来聊聊AGV的导航导引方式。
导航导引技术作为AGV的核心技术之一,能让AGV运行过程中“知道”自己在什么位置,早期的AGV多是使用电磁导引或磁带导引的方式,电磁导引是通过在地下埋设金属线,AGV通过车载电磁传感器感应金属线发出的磁信号来实现导引,这种导引技术的优势在于原理简单,不受声光干扰,制造成本低,但是缺点同样明显。首先是后期难以扩展和更改线路,也无法在工作过程中实时更改任务,容易受到金属等磁性物质的干扰,磁带导引与电磁导引类似,通过在地面上铺设磁带的形式实现导引,灵活性比电磁导引较高,重新铺设磁带也较容易,但是仍无法实时更改任务,同样易受磁性物质干扰,磁带铺设在地面上,也容易受到损毁,要定期维护,这两种导引方式适用于路线较为简单的生产制造型场景,如:汽车制造工厂等。

目前市场主流的导航方式是二维码导引+惯性导航,二维码导引方式是通过离散铺设QR二维码,通过AGV车载摄像头扫描解析二维码获取实时坐标,惯性导航是在AGV上安装陀螺仪,利用陀螺仪可以获取AGV的三轴角速度和加速度,通过积分运算对AGV进行导航定位,但是因为陀螺仪本身随着时间增长,误差会累积增大的绝对硬伤,使得惯性导航通常作为其他导航方式的辅助,比如在两个二维码之间的盲区使用惯性导航,通过二维码时重新校正位置,大家熟悉的亚马逊KIVA机器人就是采用这种导航方式,这种方式相对灵活,铺设和改变路径也比较方便,缺点是二维码易磨损,需定期维护,对陀螺仪的精度和使用寿命也有严格的要求,这种融合导航的方式适用于大多数仓库场景。

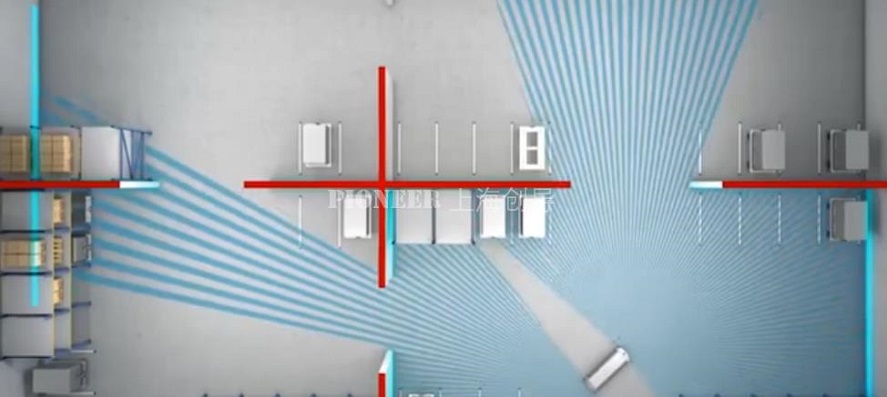
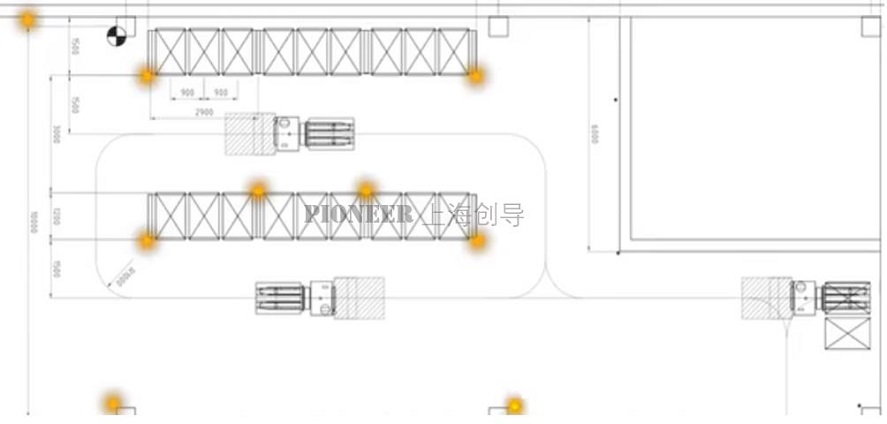
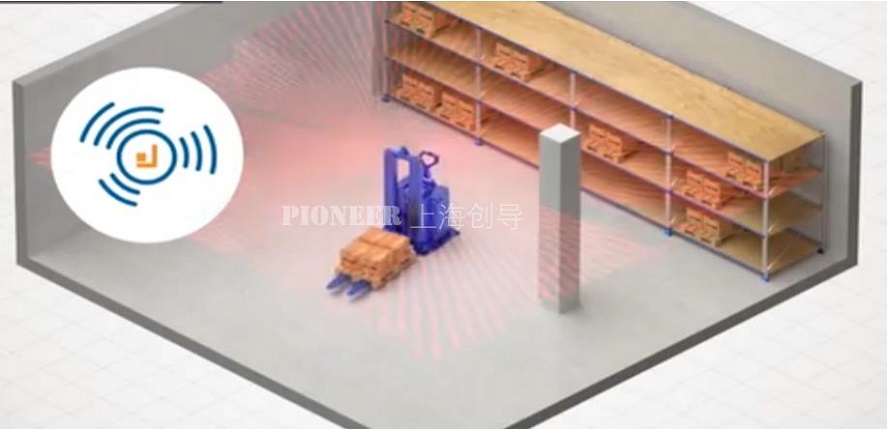
随着SLAM算法的发展,这种即时定位与地图构建的自由路径导航方式也被一些AGV厂家所使用,目前常见的SLAM导航主要有激光导航和视觉导航两大类,传统激光导航的原理是在AGV行驶路线上安装位置精确的反射板,AGV的车载激光传感器会在行走时发出激光束,激光束被多组反射板反射回来,接收器接收反射回来的激光并记录其角度值,通过结合反射板位置分析计算后,可以计算出AGV的准确坐标,其优势在于无需地面定位设施,灵活度高,缺点是制造成本高,对环境要求较为苛刻。而SLAM激光导航则是一种无需使用反射板的自然导航方式,它是通过工作场景中的自然环境,如:仓库中的柱子、墙面等作为定位参照物以实现定位导航,相比于传统的激光导航,它的优势是制造成本较低,视觉导航是通过车载视觉摄像头采集运行区域的图像信息,通过图像信息的处理来进行定位和导航,视觉导航具有高灵活性,适用范围广和成本低等优点,但是目前技术成熟度一般,利用车载视觉系统快速准确地实现路标识别这一技术仍处于瓶颈阶段。

扫二维码用手机看
上海创导物流工业研究所
上海创导知合装备科技有限公司
电话:0086-21-56634135 66532769
传真:021-66532709
邮箱:chd@vip.163.com
网址:www.shpioneer.com
地址:上海市静安区梅园路228号企业广场711单元
(地铁一号线汉中路站1号口)

扫一扫浏览手机端